Lecture 44
Resistive Modes of a Sheet Pinch
Overview
The slab sheet pinch is the cleanest place to see that “resistive MHD” is not just
one instability but a small family of related boundary-layer problems. In the classical
Furth–Killeen–Rosenbluth (FKR) picture, the same reduced equations support three
distinct branches: a long-wave tearing mode that reconnects field lines and is governed
by the outer matching parameter \(\Delta '\); a short-wave rippling mode that corrugates the
current sheet without changing topology; and a low-\(g\) gravitational/interchange branch
that survives even in the presence of magnetic shear.
This appendix is therefore meant to complement Lecture 30 and Lecture 31. The
cylindrical lectures carry the main physical development, but the slab problem is where
the boundary-layer logic is most transparent: non-local outer ideal matching for tearing,
local buoyancy-like drive for interchange, and a separate parity class for rippling.
Historical Perspective
The 1963 paper of Furth, Killeen, and Rosenbluth did more than derive the familiar
\(\eta ^{3/5}\) tearing growth rate. It already organized the resistive sheet-pinch problem into
three branches: tearing, rippling, and gravitational/interchange Furth et al. (1963).
That is a remarkably modern viewpoint. The tearing branch is the ancestor of the
matched-asymptotic calculations used throughout reconnection theory; the interchange
branch is the slab ancestor of the pressure-driven resistive modes discussed later in
cylindrical geometry; and the rippling branch is an early reminder that transport
coefficients and parity matter, not just the ideal energy principle.
Roberts and Taylor soon reinterpreted the gravitational branch in a way that
made its connection to ordinary buoyancy and convection much clearer Roberts and
Taylor (1965). The step from slab gravity to cylindrical bad curvature was then made
by Coppi, Greene, and Johnson, who showed how the same logic reappears in a diffuse
linear pinch Coppi et al. (1966). In that sense the slab appendix is historically small
but conceptually central: the later cylindrical lectures are refinements, not replacements.
Caution
Do not blur the three branches.
Tearing is non-local: it needs an outer ideal solution and the matching index \(\Delta '\). The
gravitational/interchange branch is local: its drive is buoyancy-like and its canonical
scaling is \(\gamma \sim \eta ^{1/3}\), just as in Eq. (31.15). The rippling branch is different again: it depends on
current crossing resistivity gradients, so it is much more sensitive to transport closure
and is often suppressed once realistic thermal conduction is included Furth et al. (1963).
44.1 Equilibrium and reduced slab equations
Consider a planar equilibrium with reconnecting field in the \(y\) direction and a uniform guide field in the \(z\)
direction,
\[\B _0 = B_y(x)\,\ey + B_z\,\ez , \qquad \J _0 = \frac {1}{\muo } B_y'(x)\,\ez . \tag{J.1}\]
If we also allow a uniform gravity \(g \, \ex \), then transverse force balance is \[\frac {d}{dx}\left (p_0 + \frac {B_y^2 + B_z^2}{2\muo }\right ) = \rho _0 g. \tag{J.2}\]
For the tearing problem we will set \(g=0\); for the gravitational/interchange branch we keep it. Perturbations are
taken in the form \[\sim e^{\gamma t + i k y}, \tag{J.3}\]
and we use flux and stream functions defined by \[\B _1 = -\curl \!\left (\psi \,\ez \right ), \qquad \uvec _1 = -\curl \!\left (\phi \,\ez \right ). \tag{J.4}\]
These give \[b_x = -ik\psi , \qquad b_y = \psi ', \qquad v_x = -ik\phi , \qquad v_y = \phi ', \tag{J.5}\]
and the perturbed sheet current is \[\muo j_{1z} = \psi '' - k^2 \psi . \tag{J.6}\]
It is also convenient to introduce the radial displacement \[\xi (x) \equiv \frac {v_x}{\gamma } = -\frac {ik}{\gamma }\phi . \tag{J.7}\]
Tutorial
From the full linearized equations to the reduced sheet-pinch system.
Start from the linearized resistive-MHD equations, now allowing both gravity and a possibly
nonuniform magnetic diffusivity \(\eta _m(x)\equiv \eta (x)/\muo \):
\[\begin{aligned}\rho _0 \gamma \uvec _1 &= \J _1\times \B _0 + \J _0\times \B _1 - \nabla p_1 + \rho _1 g\,\ex , \\ \gamma \B _1 &= \nabla \times (\uvec _1\times \B _0) - \nabla \times \bigl (\eta _m \nabla \times \B _1\bigr ), \\ \gamma \rho _1 + v_x \rho _0' &= 0, \qquad \nabla \cdot \uvec _1 = 0, \qquad \nabla \cdot \B _1 = 0.\end{aligned} \tag{J.8}\]
Take the \(\hat z\) component of the curl of Eq. (J.8). The perturbed pressure is then annihilated, just
as in the tearing tutorial box in Lecture 30, and one obtains
\[\rho _0 \gamma \,(\phi ''-k^2\phi ) = \frac {ik B_y}{\muo }(\psi ''-k^2\psi ) - \frac {ik B_y''}{\muo }\,\psi + ik g\,\rho _1. \tag{J.11}\]
The first term on the right is field-line bending, the second is the current-gradient drive
familiar from tearing, and the last is the buoyancy source.
The induction equation gives a flux evolution law,
\[\gamma \psi = ik B_y\phi + \bigl (\eta _m\psi '\bigr )' - k^2\eta _m\psi . \tag{J.12}\]
For constant diffusivity this reduces to \[\gamma \psi = ik B_y\phi + \eta _m(\psi ''-k^2\psi ). \tag{J.13}\]
Finally, incompressibility gives \[\rho _1 = -\rho _0'\xi . \tag{J.14}\]
Equations (J.11), (J.12), and (J.14) are the slab analogue of the reduced cylindrical systems
derived in Lectures 30 and 31.
What survives in each branch.
The three FKR branches are obtained by making different physical simplifications of the same system. If \(g=0\)
and \(\eta _m' = 0\), one gets the standard tearing problem. If \(g=0\) but \(\eta _m'\neq 0\), odd-parity perturbations can be driven by current
crossing the resistivity gradient, giving the rippling mode. If \(g\neq 0\) and \(\rho _0'\neq 0\), one obtains the resistive
gravitational/interchange branch.
44.2 Outer ideal matching and the tearing branch
Set \(g=0\) and take \(\eta _m\) constant. Outside the thin resistive layer, inertia and resistivity are both negligible.
Equation (J.13) then gives
\[\phi = -\frac {\gamma }{ik B_y}\,\psi , \tag{J.15}\]
and substituting this into Eq. (J.11) produces the ideal outer equation \[\psi '' - \left (k^2 + \frac {B_y''}{B_y}\right )\psi = 0. \tag{J.16}\]
This is the slab version of the cylindrical outer equation Eq. (30.17). The singular point is the
field-reversal surface, which we take at \(x=0\), so \(B_y(0)=0\).
The only information the inner layer needs from the outer ideal problem is the logarithmic jump parameter
\[\Delta ' \equiv \left .\frac {\psi '}{\psi }\right |_{0^-}^{0^+}, \tag{J.17}\]
which is the slab analogue of Eq. (30.2). In the constant-\(\psi \) regime this is again the quantity that controls
the classical tearing instability.
The Harris sheet.
For
\[B_y(x) = B_0 \tanh \!\left (\frac {x}{a}\right ), \tag{J.18}\]
Eq. (J.16) becomes \[\psi '' - \left [k^2 - \frac {2}{a^2}\operatorname {sech}^2\!\left (\frac {x}{a}\right )\right ]\psi = 0. \tag{J.19}\]
The exact outer solution gives \[\Delta ' a = 2\left (\frac {1}{ka} - ka\right ), \tag{J.20}\]
so the long-wave branch \(ka<1\) is tearing-unstable and the short-wave branch \(ka>1\) is stable. This is the slab
counterpart of the worked analytic \(\Delta '\) examples in the cylindrical lecture.
Tutorial
Parity, islands, and why tearing is non-local.
For a symmetric reversing sheet, \(B_y(-x)=-B_y(x)\). The natural parity assignments are then
\[\begin{aligned}\text {tearing parity:} &\qquad \psi (-x)=\psi (x), \qquad \phi (-x)=-\phi (x), \\ \text {rippling/interchange parity:} &\qquad \psi (-x)=-\psi (x), \qquad \phi (-x)=\phi (x).\end{aligned} \tag{J.21}\]
In tearing parity, the flux perturbation is finite at the resonant surface,
\[\psi (0)\neq 0,\]
so the perturbed magnetic topology contains a true island. In slab geometry the island width is
\[w = 4\sqrt {\frac {|\psi (0)|}{|B_y'(0)|}}. \tag{J.24}\]
Thus tearing is intrinsically topological: it needs a finite reconnecting flux at the resonant
surface. Since that flux is determined by matching to the outer ideal solution, the instability is
non-local and \(\Delta '\) is unavoidable.
In the odd-parity branches, by contrast, \(\psi (0)=0\). The current sheet can corrugate or the plasma can
execute buoyant motions, but the magnetic topology does not change at leading order.
That is why the rippling and interchange branches should not be described as
“tearing with extra physics.” They are different parity classes of the same reduced
equations.
Classical FKR scaling.
The full matching calculation was carried out in the cylindrical lecture, culminating in Eq. (30.59). In slab
notation the same constant-\(\psi \) result is
\[\gamma \tau _A \sim S^{-3/5}(ka)^{2/5}(\Delta ' a)^{4/5}, \qquad \frac {\delta }{a} \sim S^{-2/5}(ka)^{-2/5}(\Delta ' a)^{1/5}, \tag{J.25}\]
where \(\tau _A=a/V_A\), \(\tau _R=a^2/\eta _m\), and \(S=\tau _R/\tau _A\). The important lesson for this appendix is not the numerical prefactor but the
logic: outer ideal matching produces \(\Delta '\), while the inner resistive layer converts \(\Delta '\) into a growth
rate.
44.3 The rippling branch
The rippling mode is easiest to understand by returning to the generalized induction equation (J.12).
When \(\eta _m\) varies across the sheet,
\[\bigl (\eta _m\psi '\bigr )' - k^2\eta _m\psi = \eta _m(\psi ''-k^2\psi ) + \eta _m'\psi '. \tag{J.26}\]
The extra term \(\eta _m'\psi '\) is the seed of the rippling branch. For odd parity, \(\psi \) is odd and \(\psi '\) is even, so a symmetric
resistivity peak at the current sheet feeds back on an even stream function \(\phi \) without requiring
\(\psi (0)\neq 0\).
Physical picture.
The sheet carries a strong equilibrium current \(J_{0z}\). An even displacement field corrugates that current sheet,
moving current across the resistivity gradient. Because the local ohomic diffusion time differs on the two
sides of the corrugation, diffusion supplies the phase shift that lets the perturbation grow. The current
sheet therefore ripples rather than reconnects.
What is and is not shared with tearing.
Like tearing, the rippling branch lives in a thin resistive layer, and in the original FKR ordering its growth
rate has the same parametric scaling,
\[\gamma _{\rm ripple} \sim \tau _R^{-3/5}\tau _A^{-2/5}, \tag{J.27}\]
but the physics is different. There is no outer \(\Delta '\) bookkeeping because the mode is not island-forming.
Moreover, because the drive comes through transport gradients, the branch is far more sensitive to thermal
conduction and closure assumptions than the tearing branch. This is one reason it is discussed less often in
modern reconnection discussions, despite already appearing in the original FKR paper Furth
et al. (1963).
44.4 The gravitational and resistive-interchange branch
Now keep gravity and a density gradient. Using Eq. (J.14), the buoyancy term in Eq. (J.11) becomes
\[ikg\rho _1 = -ikg\rho _0'\xi . \tag{J.28}\]
Near the resonant surface, write \[B_y(x) \simeq B_s' x. \tag{J.29}\]
The field-line bending force is then proportional to \(x^2\), so shear strongly weakens the ideal magnetic restoring
force right where the buoyancy drive is concentrated. This is precisely the same geometric lesson that later
reappears in the cylindrical resistive-interchange problem.
Local parity.
The gravitational branch has interchange parity,
\[\phi (-x)=\phi (x), \qquad \psi (-x)=-\psi (x), \tag{J.30}\]
so it does not reconnect at leading order. The motion is buoyant or convective rather than tearing-like. In
this sense the slab gravitational mode is the direct ancestor of the cylindrical interchange parity discussed
around Eq. (31.45).
Low-\(g\) resistive scaling.
The original FKR calculation found that, for weak enough gravity that the mode remains a genuine
resistive boundary-layer problem, the growth rate scales as
\[\gamma _{\rm grav} \sim \tau _R^{-1/3}\tau _H^{-2/3}, \tag{J.31}\]
with \(\tau _H\) the appropriate hydromagnetic transit time of the sheared layer Furth et al. (1963). This is the slab
precursor of the \(\eta ^{1/3}\) scaling written in cylindrical form in Eq. (31.15). As the buoyancy drive becomes
stronger, the mode crosses over smoothly to the familiar ideal interchange/Rayleigh–Taylor
limit.
Connection to the cylindrical resistive-interchange lecture.
In the slab problem, the destabilizing physics is explicit gravity acting on a density gradient. In the
cylindrical pinch, gravity is replaced by bad curvature acting on the pressure gradient. The mathematical
role is the same: a local buoyancy-like source competes with a magnetic restoring force that vanishes at the
resonant surface. What the cylindrical lecture adds is the second parity class—the pressure-driven
tearing-like branch—which can form islands even when the classical outer tearing index is
negative.
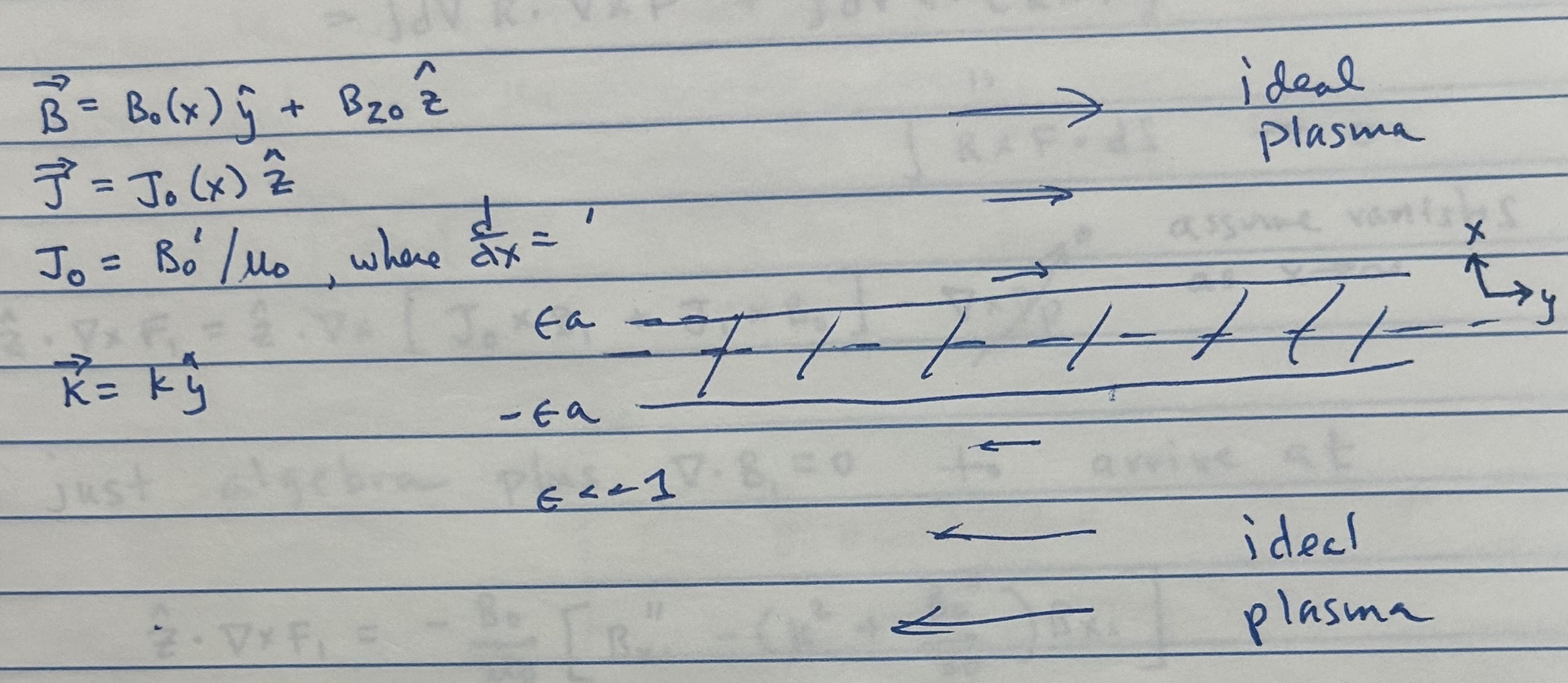
44.5 FKR via Power Flow
We consider a Cartesian slab with equilibrium magnetic field
\[\bm {B}_0 = B_0(x)\,\hat {\bm y} + B_{z0}\,\hat {\bm z},\]
and equilibrium current \[\bm {J}_0 = J_0(x)\,\hat {\bm z}, \qquad J_0 = \frac {1}{\mu _0}\frac {dB_0}{dx}.\]
Perturbations are taken of the form \[\sim e^{\gamma t + i k y},\]
with wavevector \(\bm {k}=k\hat {\bm y}\).
We assume incompressibility,
\[\nabla \cdot \bm {v}_1=0,\]
and adopt a vector–potential representation for the perturbed velocity, \[\bm {v}_1=\nabla \times \phi \bm {e}_z\]
Steps:
-
1.
- Evaluate \(P = \int dV \bm {F} \cdot \bm {v}\), where \(\bm {F} = \bm {J}\times \bm {B} - \nabla p\). If \(P>0\rightarrow \) instability.
-
2.
- Use scale separation for a boundary layer problem to connect "inner" to "outer" solution.
-
3.
- Use MHD eqn’s to relate \(\bm {v}_1\) and \(\bm {B}_1\) perturbations in inner region
-
4.
- Find growth rate, \(\gamma \), for linear solution.
Follow the Energy
The work done by the perturbed force is
\[P=\int dV\,\bm {F}\cdot \bm {v}_1, \qquad \bm {F}=\bm {J}\times \bm {B}-\nabla p .\]
Instability corresponds to \(P>0\).
Using the vector identities
\[\begin{aligned}P &= \int dV\,\bm {F}\cdot \vect {v} \nonumber \\ &= \int dV\,\bm {F}\cdot (\nabla \times \phi \vect {e}_z) \nonumber \\ &= \int dV\,\phi \vect {e}_z \cdot (\nabla \times \bm {F}) + \oint d\bm {S}\cdot (\phi \vect {e}_z\times \bm {F}).\end{aligned}\]
Assuming perturbations vanish at infinity, the surface term is zero.
Linearizing the force and using \(\nabla \cdot \bm {B}_1=0\),
\[\vect {e}_z \cdot \nabla \times \bm {F}_1 = \vect {e}_z \cdot \nabla \times (\bm {J}_0\times \bm {B}_1 +\bm {J}_1\times \bm {B}_0 -\nabla p )\]
straightforward algebra yields \[\vect {e}_z \cdot \nabla \times \bm {F}_1 = -\frac {B_0}{\mu _0} \left [ B_{x1}'' - \left (k^2+\frac {B_0''}{B_0}\right )B_{x1} \right ].\]
The velocity and magnetic perturbations are related through the induction equation,
\[\partial _t \bm {B}_1 = \nabla \times (\bm {v}_1\times \bm {B}_0) - \frac {\eta }{\mu _0}\nabla ^2\bm {B}_1 .\]
In the outer ideal region resistivity is negligible, giving
\[\gamma B_{x1}=ikB_0 v_{x1},\]
so that \[\phi =\frac {v_{x1}}{ik} = \frac {\gamma }{k^2B_0}B_{x1}.\]
Substituting into the power integral gives \[P = \int _{-\infty }^{\infty }dx\, \frac {\gamma }{\mu _0 k^2} B_{x1} \left [ B_{x1}''- \left (k^2+\frac {B_0''}{B_0}\right )B_{x1} \right ].\]
Outer Ideal Region and \(\Delta '\)
In the ideal outer region inertia is negligible and \(\bm {F}\approx 0\), so the governing equation becomes
\[B_{x1}''- \left (k^2+\frac {B_0''}{B_0}\right )B_{x1}=0.\]
This equation is singular at the resonant surface \(x=0\), where \(B_0=0\) at \(x=0\). Hence, the contribution to power is
concentrated in the inner region, and thus the energy flow from magnetic field into plasma is all in the
inner layer: \[P = \int _{-\infty }^{\infty }[...]dx\ \simeq \int _{-\epsilon a}^{\epsilon a }[...]dx\]
Across this layer:
- \(B_{x1}\) is continuous,
- \(dB_{x1}/dx\) is discontinuous due to the sheet current.
- In the constant–\(\psi \) approximation we take \(B_{x1}\approx B_{x1}(0)\) across the inner layer.
- expect gradients \(\frac {d}{dx}\) to dominate.
\[\begin{aligned}P & \approx \int _{-\epsilon a}^{\epsilon a } \frac {\gamma }{\mu _0 k^2} B_{x1}(0) \frac {\partial ^2 B_{x1}}{\partial x^2} dx \\ & = \frac {\gamma }{\mu _0 k^2} B_{x1}^2(0) \underbrace {\frac {1}{B_{x1}(0)} \left \{ \left .\frac {dB_{x1}}{dx}\right |_{\epsilon a} - \left . \frac {dB_{x1}}{dx}\right |_{-\epsilon a} \right \}}_{\equiv \Delta '}\end{aligned}\]
Define the tearing stability parameter
\[\Delta ' = \frac {1}{B_{x1}(0)} \left [ \left .\frac {dB_{x1}}{dx}\right |_{0^+} - \left .\frac {dB_{x1}}{dx}\right |_{0^-} \right ].\]
Evaluating the power integral across the thin inner region gives
\[P= \frac {\gamma B_{x1}^2(0)}{\mu _0 k^2}\Delta '.\]
Thus
\[\Delta '>0 \quad \Rightarrow \quad P>0,\]
which implies instability. First solved by Furth, Kileen and Rosenbluth, hence goes by "FKR" Furth
et al. (1963) Importantly, stability is determined entirely by the outer ideal solution; the growth rate
depends on the inner region physics.
Solving for the Inner Resistive Layer
Inside the inner layer neither inertia nor resistivity can be neglected.
First, lets deal with inertia that we neglected in the linearized momentum equation:
\[\begin{aligned}\hat {\bm {z}}\cdot \nabla \times \left [ \rho \frac {d\bm {v}}{dt} \right ] & = \hat {\bm {z}}\cdot \nabla \times \left (\rho (\partial _t \bm {v} + \cancel { \bm {v} \cdot \nabla \bm {v}})\right ) \\ \rho \,\partial _t(\nabla \times \bm {v}_1)_z & = \rho \gamma \left (\frac {dv_{y1}}{dx}-ikv_{x1}\right ),\end{aligned}\]
and incompressibility implies
\[v_{y1}=-\frac {1}{ik}\frac {dv_{x1}}{dx}.\]
so that \[\begin{aligned}\hat {\bm {z}}\cdot \nabla \times \left [ \rho \frac {d\bm {v}}{dt} \right ] & = \rho \gamma \left (\frac {-1}{ik} \frac {d^2v_{x1}}{dx^2}-ikv_{x1}\right ), \\ & = \frac {i \rho \gamma }{k} \left ( \frac {d^2v_{x1}}{dx^2}-k^2v_{x1}\right ).\end{aligned}\]
Combining with previous result:
\[\frac {i \rho \gamma }{k} \left ( \frac {d^2v_{x1}}{dx^2}-k^2v_{x1}\right )= -\frac {B_0}{\mu _0} \left [ B_{x1}'' - \left (k^2+\frac {B_0''}{B_0}\right )B_{x1} \right ].\]
From the \(\hat {\bm {x}}\) component of the magnetic induction equation
\[\hat {\bm {x}} \cdot \left [ \partial _t \bm {B}_1 = \nabla \times (\bm {v}_1 \times \bm {B}_0) - \frac {\eta }{\mu _0} \nabla ^2 \bm {B}_1\right ]\]
arrive at \[\gamma B_{x1} = i k B_0 v_{x1} + \frac {\eta }{\mu _0} \left ( B_{x1}^{\prime \prime } - k^2 B_{x1}\right )\]
Combining with the induction equation,
\[\gamma B_{x1} = ikB_0 v_{x1} + \frac {\eta }{\mu _0}\left (B_{x1}''-k^2B_{x1}\right ).\]
Using the constant–\(\psi \) approximation and eliminating \(B_{x1}''\), one finds the inner-layer balance leading to the
classical FKR scaling.
\[\rho \left (v_{x1}''-k^2 v_{x1}\right ) - \frac {k^2 B_0^2}{\gamma \eta }\,v_{x1} = \frac {ik}{\gamma \eta } \left ( \gamma -\frac {\eta }{\mu _0}\frac {B_0''}{B_0} \right ) B_{x1}(0)\]
Dimensional analysis for sheet width:
Note:
\[B_0(x)\simeq B_0\frac {x}{a} \qquad \Rightarrow \qquad B_0(\pm \epsilon a)=\pm B_0\epsilon .\]
Also write \[\frac {d^2}{dx^2}\gg k^2 \qquad \text {in the sheet}.\]
\[\frac {1}{(\epsilon a)^2} \sim \frac {k^2 \epsilon ^2 B_0^2}{\rho \gamma \eta } \qquad \text {or}\qquad \frac {1}{(\epsilon a)^4} \sim \frac {k^2 B_0^2}{\rho \gamma \eta a^2}.\]
Isolate growth rate by balancing power driven from ideal region with ohmic dissipation in the
sheet.
\[P_\Omega =\int dV\,\eta J^2 \simeq \epsilon a\,\eta J_{z1}^2(0)\]
\[\mu _0 J_{z1} = \frac {\partial B_{y1}}{\partial x} \sim \frac {B_{y1}(\epsilon a)-B_{y1}(-\epsilon a)}{\epsilon a}\]
From \(\nabla \cdot \bm {B}_1=0\),
\[ik B_{y1}=\frac {dB_{x1}}{dx}.\]
\[\mu _0 J_{z1} \simeq \frac { \left .\dfrac {dB_{x1}}{dx}\right |_{\epsilon a} - \left .\dfrac {dB_{x1}}{dx}\right |_{-\epsilon a} } {ik\,\epsilon a} = \frac {B_{x1}(0)}{ik\,\epsilon a}\Delta '.\]
So that the total power (by this method) is \[P_\Omega = \frac {\epsilon a \eta }{\mu _0^2} \frac {B_{x1}^2(0) \Delta '^2}{k^2 \epsilon ^2 a^2}\]
FKR Growth Rate from Power Balance
Equating power input to resistive dissipation yields
\[\frac {\gamma B_{x1}^2(0)}{\mu _0 k^2}\Delta ' = \frac {\epsilon a \eta }{\mu _0^2} \frac {B_{x1}^2(0) \Delta '^2}{k^2 \epsilon ^2 a^2}\]
so that the growth rate \[\gamma = \frac {\eta }{\mu _0}\frac {\Delta '}{\epsilon a}.\]
Using the previous result for \((\epsilon a)^4\) \[\gamma ^4 =(\eta /\mu _0)^4 \Delta '^4 \frac {k^2 B_0^2}{\rho \gamma \eta a^2}\]
Thus, \[\gamma = \left (\frac {k^2 B_0^2}{\mu _0\rho a^2}\right )^{1/5} \left (\frac {\eta }{\mu _0}\right )^{3/5} \Delta '^{4/5}.\]
Introducing the Alfvén time \[\tau _A=\frac {a}{V_A}=\frac {a\sqrt {\mu _0\rho }}{B_0},\]
the resistive diffusion time \[\tau _R=\frac {\mu _0 a^2}{\eta },\]
and the Lundquist number \(S=\tau _R/\tau _A\), the growth rate may be written \[\gamma \tau _A = (\Delta 'a)^{4/5}S^{-3/5}(ka)^{2/5}.\]
Takeaways
What this appendix should leave behind.
- The slab sheet pinch is the simplest matched-asymptotic resistive-MHD problem.
- The tearing branch is even in \(\psi \), forms islands, and is governed by the non-local
matching parameter \(\Delta '\).
- The rippling branch is odd in \(\psi \), does not reconnect at leading order, and is driven
by current crossing resistivity gradients.
- The gravitational branch is also odd in \(\psi \), is buoyancy-like, and exhibits the
characteristic \(\eta ^{1/3}\) resistive-interchange scaling.
- The cylindrical tearing and resistive-interchange lectures are best read as geometric
refinements of this same basic slab logic.
Bibliography
Harold P. Furth, John Killeen, and Marshall N. Rosenbluth. Finite-resistivity instabilities of a sheet pinch. Physics of Fluids, 6(4):459–484, 1963. doi:10.1063/1.1706761.
K. V. Roberts and J. B. Taylor. Gravitational resistive instability of an incompressible plasma in a sheared magnetic field. Physics of Fluids, 8(2):315–322, 1965. doi:10.1063/1.1761225.
Bruno Coppi, John M. Greene, and John L. Johnson. Resistive instabilities in a diffuse linear pinch. Nuclear Fusion, 6(2):101–117, 1966. doi:10.1088/0029-5515/6/2/003.
Problems
-
Problem 44.1.
- Starting from Eqs. (J.8)–(J.10), derive the reduced slab equations (J.11) and
(J.12) in detail.
-
Problem 44.2.
- For the Harris sheet (J.18), solve the outer equation (J.19) and verify Eq. (J.20).
-
Problem 44.3.
- Using the parity assignments (J.21) and (J.22), show directly from Eq. (J.24) why
the tearing branch forms islands while the rippling and interchange branches do
not.
-
Problem 44.4.
- Recover the dimensional estimates in Eqs. (J.25) and (J.31) by balancing
induction, field-line bending, and either outer matching (for tearing) or buoyancy
(for the gravitational branch).