Hartmann flow is the classic liquid-metal problem that teaches three MHD lessons at once.
- 1.
- a magnetic field can strongly reshape a velocity profile even when magnetic advection is weak;
- 2.
- the balance among pressure, viscosity, and Lorentz force naturally produces the Hartmann number;
- 3.
- current closure at the walls is every bit as important as the bulk momentum balance.
Hartmann flow is one of the cleanest examples in all of MHD because the formal equations and the laboratory experiment sit very close together. In a liquid metal the assumptions of resistive–viscous MHD are often excellent, yet the magnetic Reynolds number can remain small. That makes this problem an ideal bridge between the general equations of the earlier lectures and a canonical laboratory flow.
The original analysis of pressure-driven flow in a transverse magnetic field goes back to Hartmann’s mercury experiments in the 1930s [Hartmann, 1937, Hartmann and Lazarus, 1937]. Hide and Roberts later turned these examples into textbook MHD problems with a clear physical interpretation [Hide and Roberts, 1962, Roberts, 1967]. Shercliff and Hunt showed how the story extends to real ducts, where sidewall current closure creates an additional family of boundary layers [Shercliff, 1956, Hunt, 1965].
Large magnetic influence does not mean ideal MHD. Many liquid-metal duct flows have \(\mathrm {Ha}\gg 1\) and yet \(\mathrm {Rm}\ll 1\). The magnetic field strongly brakes and reorganizes the flow, but the flux-freezing picture developed earlier is not the right language. Here diffusion of the induced field is fast, and wall-controlled current closure is central.
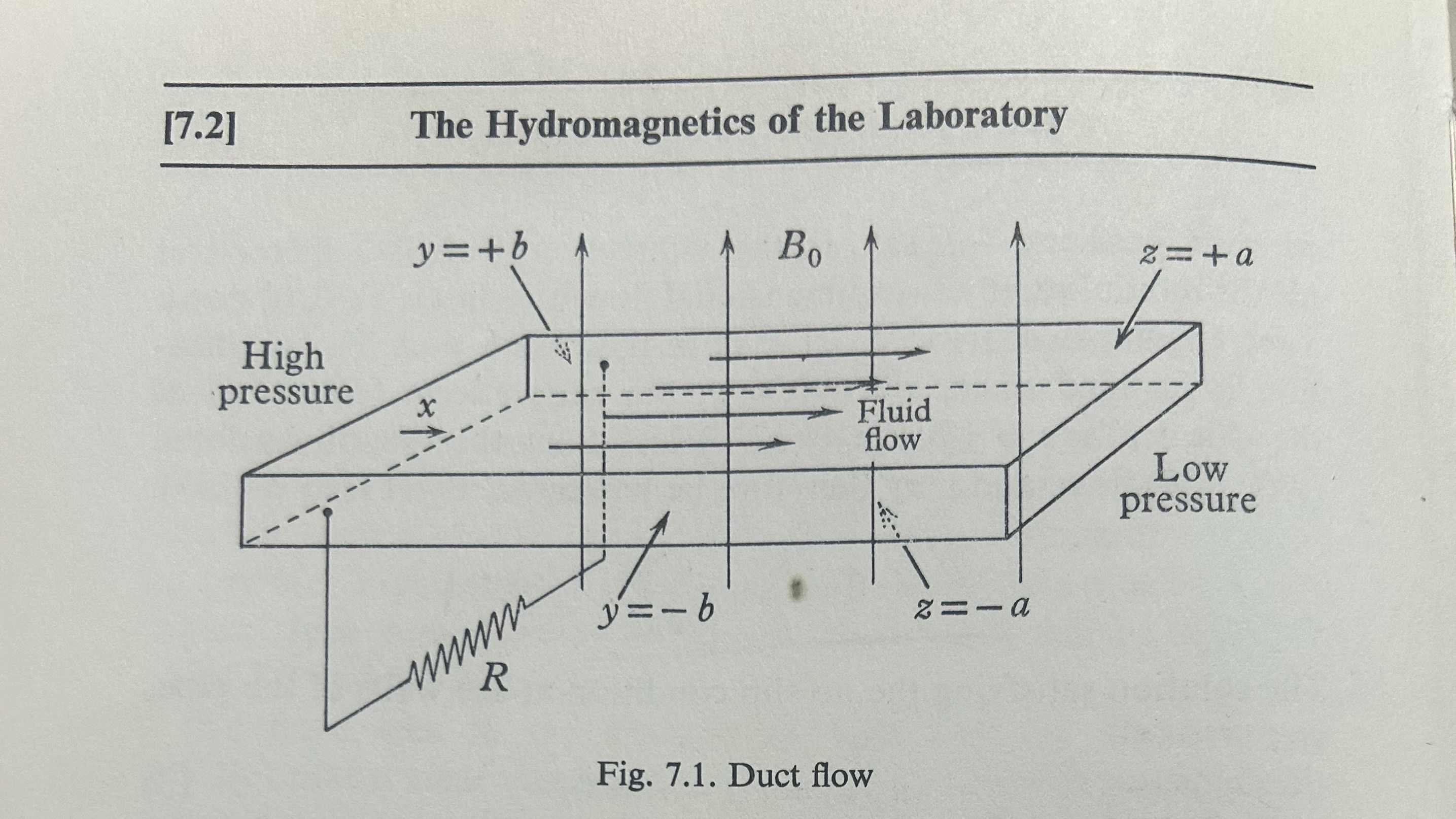
Take two parallel plates at \(x=\pm a\), infinite in \(y\) and extended along the duct direction \(z\). We impose a uniform magnetic field
The usual assumptions are
That last condition is the key difference from the flux-freezing lecture. Because \(\mathrm {Rm}\ll 1\), the magnetic field is mostly imposed rather than advected. We therefore write
If \(B_0=0\), the \(z\)-component of the steady momentum equation reduces to
With the ansatz (5.3)–(5.4), the Lorentz force points along \(\hat {z}\) because
We can search for steady solutions to the resistive, viscous MHD equations for this geometry with a transverse magnetic field \(b_x\). Note from \(\nabla \cdot \bm B= \frac {\partial b_x}{\partial x} = 0\) so that \(B_x=B_0\) a constant. the steady momentum equation becomes
The \(z\)-momentum equation becomes
Substituting (5.11) into (5.10) yields a single second-order equation for the velocity,
Hartmann number. Using \(\mu =\rho \nu \) and \(\eta =(\muo \sigma )^{-1}\), define
Solution. The general even solution of (5.14) is
The current density follows immediately from Ohm’s law,
The cross-sectional average of the velocity is
Weak magnetic field: \(\mathrm {Ha}\ll 1\). Expand the hyperbolic functions in (5.18):
Strong magnetic field: \(\mathrm {Ha}\gg 1\). In the core, away from the walls,
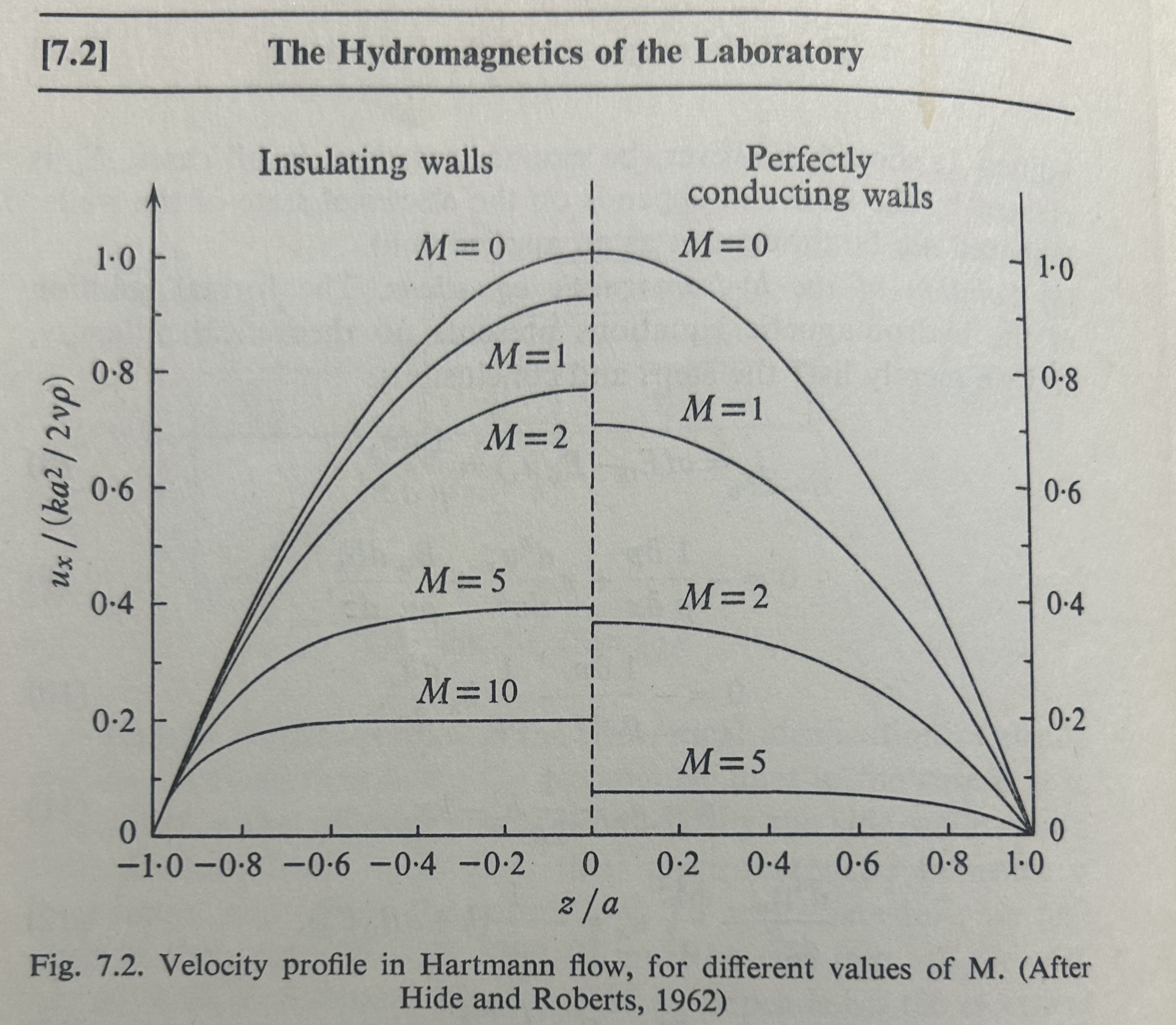
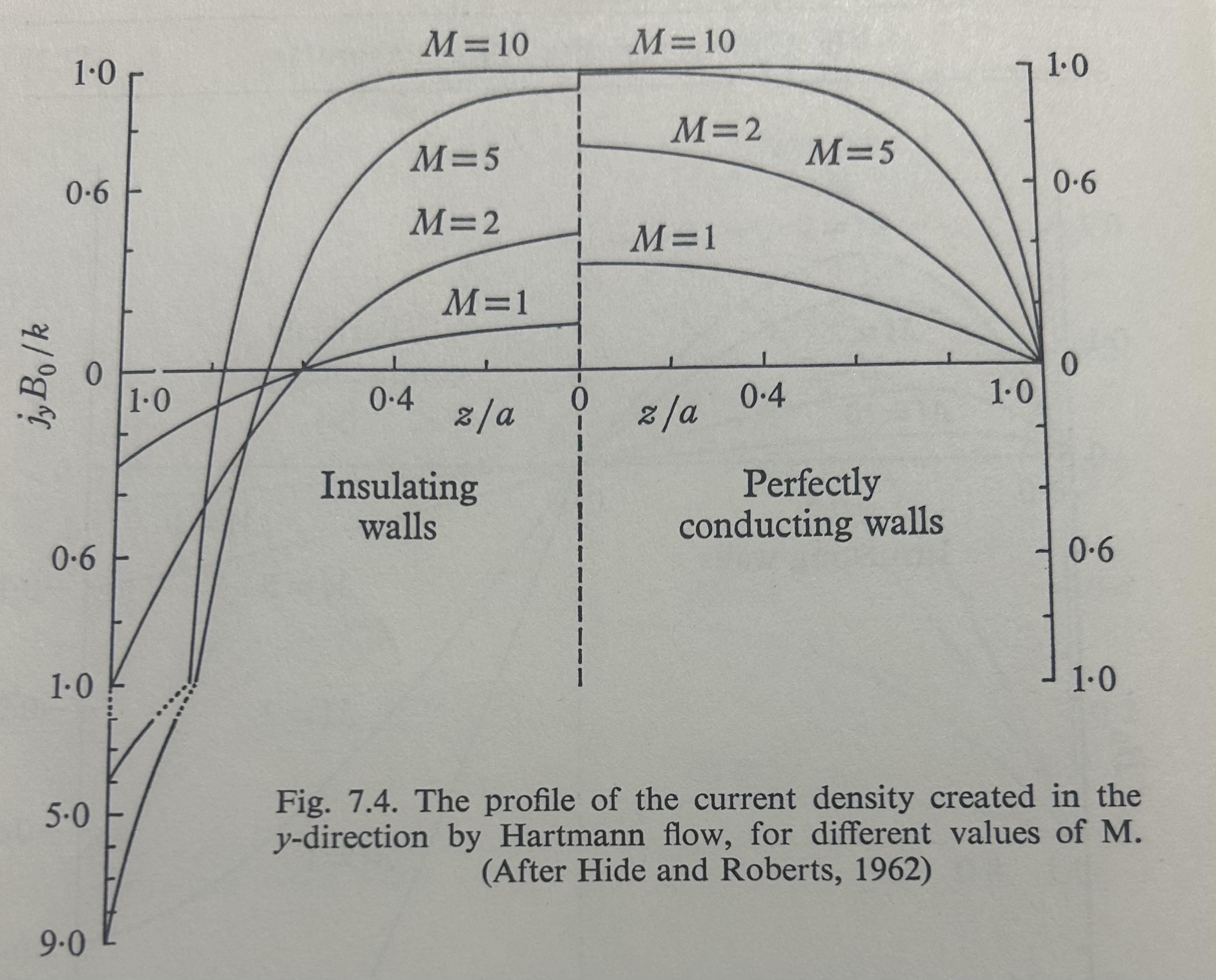
What sets \(E_y\)? Equation (5.18) leaves \(E_y\) undetermined because it is fixed by current closure. In the simplest conducting-wall or externally short-circuited limit one often sets \(E_y=0\). For insulating sidewalls, by contrast, charge buildup creates an electrostatic field that partly cancels \(\uvec \times \B \) and reduces the current. The figures in Fig. 5.2 are useful precisely because they show how much this electrical boundary condition matters.
Besides the Hartmann number, the standard control parameters are
Liquid metals typically have tiny magnetic Prandtl number \(\mathrm {Pm}\ll 1\). That is what makes the regime so instructive: one can have \(\mathrm {Rm}\ll 1\) while still reaching very large \(\mathrm {Ha}\) and \(N\). The field is not frozen in, but the Lorentz force still dominates the momentum balance.
Experimental perspective. This is the regime that matters for liquid-metal MHD experiments and for fusion-blanket technology. In PbLi, sodium, or galinstan loops, one often worries less about flux freezing than about current closure, wall conductivity, and the pressure drop required to push the fluid through strong magnetic fields. The experimental moral is very practical: if the walls let currents close easily, the magnetic braking is severe; if the walls interrupt current closure, the pressure drop can be dramatically reduced.
Interactive Hartmann-and-Shercliff Flow Explorer
Open a browser companion to the low-Rm duct-flow lecture. The app solves the coupled cross-section velocity-and-potential problem for rectangular ducts and circular pipes, lets the Hartmann and Shercliff walls be conducting or insulating, and then compares the resulting boundary layers, chord profiles, and pressure drop.
The parallel-plate solution is only the first step. In a rectangular duct the core flow remains nearly uniform for large \(\mathrm {Ha}\), but two different boundary layers appear.
Hartmann layers. On walls whose normal is parallel to the imposed magnetic field, the local balance remains the Hartmann balance and the thickness is still
Shercliff layers. On sidewalls parallel to the imposed field, currents must turn and close through broader lateral layers. Their thickness scales as
Current closure through an electrostatic potential. For arbitrary duct cross sections it is often cleaner to solve for an electric potential \(\Phi \) rather than directly for the current. Writing
Cross-section model solved by the explorer. For the browser companion it is useful to write the real-duct problem in a form that keeps the cross-section current closure explicit. This is a different coordinate choice from the earlier parallel-plate derivation above: here the flow is still along \(\hat {z}\), but the imposed field is taken to point along \(\hat {y}\) so that it lies in the duct cross section. Thus take the flow to be fully developed along \(\hat {z}\), with
What the explorer does and does not solve. The browser companion doesnot solve a separate magnetic-streamfunction problem for an induced transverse field. It works in the standard quasi-static, low-\(\mathrm {Rm}\) limit, so the magnetic field in Ohm’s law and in the Lorentz force is taken to be the imposed uniform field \(\B _0=B_0\hat {y}\). The unknowns are only the streamwise velocity \(u_z(x,y)\) and electrostatic potential \(\Phi (x,y)\). Once those are known, the cross-section current components \((J_x,J_y)\) follow directly from Ohm’s law. The only magnetic correction subsequently reconstructed is the axial component \(b_z(x,y)\); there is no separate evolution of a transverse or “poloidal” magnetic field in this reduced model.
With \(\uvec =u_z\hat {z}\) and \(\B _0=B_0\hat {y}\), one has
If one also wants the induced magnetic correction itself, the same low-\(\mathrm {Rm}\) ordering gives
Now normalize the cross-section coordinates by the Hartmann half-gap \(a\), the velocity by a reference bulk speed \(U_\ast \), and the potential by \(a B_0 U_\ast \):
This is the real reason “duct flow” becomes more interesting than the parallel-plate problem: the three-dimensional current closure can dominate the qualitative behavior.
- Hartmann flow is the canonical example of resistive–viscous MHD in the low-\(\mathrm {Rm}\) limit.
- The Hartmann number measures how strongly the magnetic field flattens the profile and confines shear to boundary layers.
- The average flow is controlled not just by pressure and viscosity, but by the wall-selected electric field \(E_y\) and therefore by the current-closure path.
- In real ducts, Hartmann layers and Shercliff layers coexist; the former are thin, the latter broader, and both are central to liquid-metal MHD design.
J. Hartmann. Hg Dynamics I: Theory of the laminar flow of an electrically conducting liquid in a homogeneous magnetic field". Mathematisk-fysiske Meddelelser, 15(6), 1937.
Julius Hartmann and Freimut Lazarus. Hg-dynamics II: Experimental investigations on the flow of mercury in a homogeneous magnetic field". Matematisk-fysiske Meddelelser, 15(7):1–45, 1937.
Raymond Hide and Paul H. Roberts. Some elementary problems in magneto-hydrodynamics. Advances in Applied Mechanics, 7:215–316, 1962. doi:10.1016/s0065-2156(08)70123-6.
P. H. Roberts. An Introduction to Magnetohydrodynamics. Longmans, London, UK, 1967. ISBN 9780582447288.
J. A. Shercliff. The flow of conducting fluids in circular pipes under transverse magnetic fields. Journal of Fluid Mechanics, 1(6):644–666, 1956. doi:10.1017/s0022112056000421.
J C R Hunt. Magnetohydrodynamic flow in rectangular ducts. Journal of Fluid Mechanics, 21(4):577–590, 1965. doi:10.1017/s0022112065000344.
Liquid metal breeding blankets often consider Pb–17Li (“PbLi”) flowing through rectangular ducts in a strong tokamak magnetic field. In this problem you will use Hartmann-flow scalings to estimate the MHD pressure drop, pumping power, and the boundary-layer thicknesses that must be resolved in simulations.
Given geometry and operating point Consider a straight rectangular duct of height \(h=10~\mathrm {cm}\) and width \(w=1~\mathrm {m}\) carrying PbLi at bulk speed \(U=1~\mathrm {m/s}\). Assume the magnetic field is uniform and transverse to the flow with magnitude \(B_0=10~\mathrm {T}\). Take the flow direction as \(\hat {z}\), and the field as \(\B _0 = B_0 \hat {x}\), so that the Hartmann walls are the two faces normal to \(\hat {x}\).
Treat the Hartmann gap as parallel plates separated by \(h\), so the half-gap is \[ a \equiv \frac {h}{2} = 0.05~\mathrm {m}. \]
Assume the textbook conducting-wall limit \(E_y=0\) in Ohm’s law, so that the mean-flow relation is given by (5.26).
Material properties (Pb–17Li, representative fusion temperature) Use the following representative values: \[ \rho \simeq 9.3\times 10^{3}\ \mathrm {kg/m^3}, \qquad \mu \simeq 1.4\times 10^{-3}\ \mathrm {Pa\cdot s}, \qquad \sigma \simeq 1.0\times 10^{6}\ \mathrm {S/m}. \] Compute the kinematic viscosity \(\nu =\mu /\rho \) and resistive diffusivity \(\eta = (\muo \sigma )^{-1}\).
Part A: dimensionless parameters and boundary layers
Part B: pressure drop For the parallel-plate Hartmann solution with \(E_y=0\), the mean speed is related to the pressure gradient by \[ \overline {u} = \frac {G}{\sigma B_0^2} \left ( 1- \frac {\tanh (\mathrm {Ha})}{\mathrm {Ha}} \right ). \]
Part C: pumping power The volumetric flow rate is \(Q = U A\), where \(A = hw\) is the duct cross-sectional area.
Sanity-check hint (order of magnitude). A consistent estimate gives \(\mathrm {Ha}\gg 1\), a Hartmann-layer thickness in the few-\(\mu \mathrm {m}\) range, and an MHD pressure drop of order \(10^8~\mathrm {Pa/m}\) for \(E_y=0\), implying pumping power of order \(\sim 10~\mathrm {MW}\) per meter of duct at the stated flow rate.